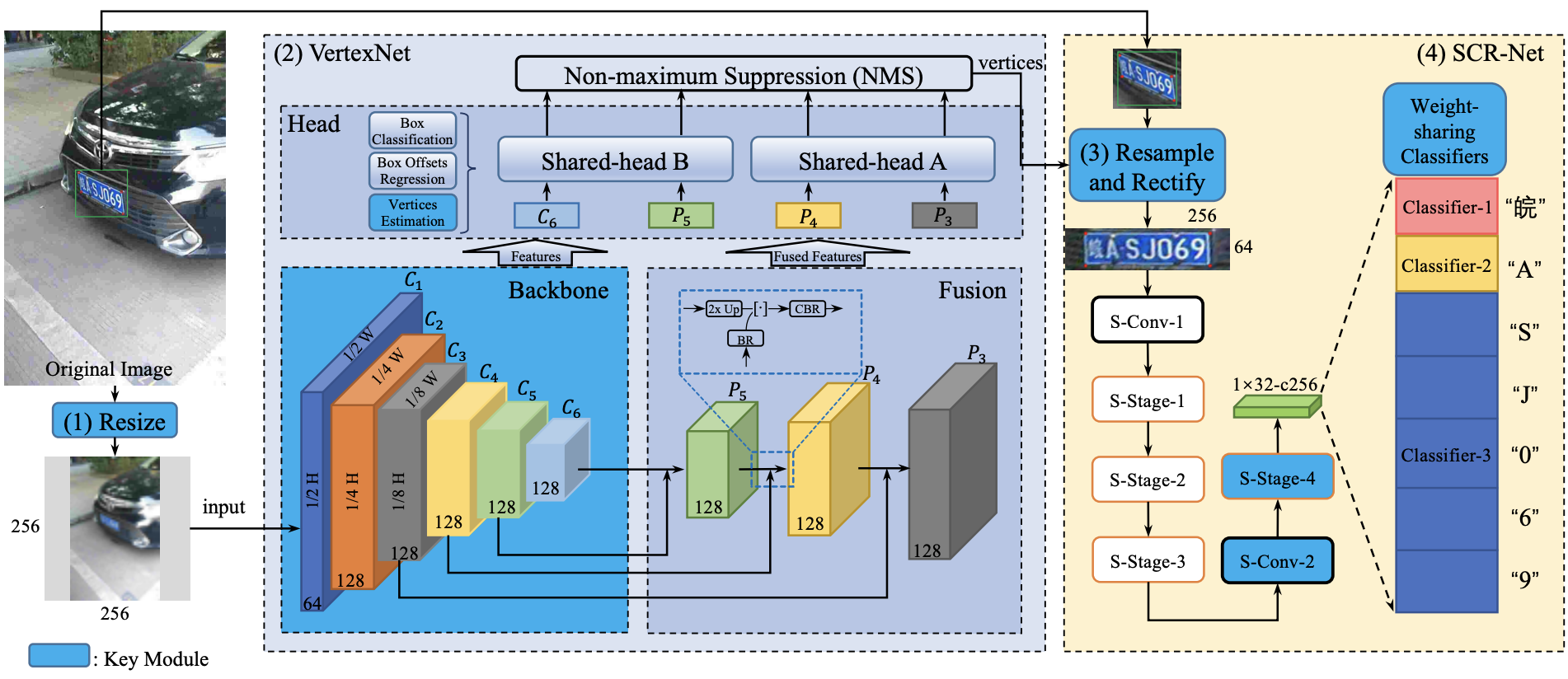
2021, IEEE TITS, High-performing Automatic License Plate Recognition

To achieve Embodied Intelligence, the AI model must learn to perceive, understand, and act within the world from a human-centric, first-person perspective. My central mission is to pioneer the field of Egocentric Perception for Embodied Intelligence, creating the foundational science and technology for assistive AI agents embedded in wearable devices and collaborative robots. These agents will be capable of seeing, thinking, memorizing, and planning, proactively assisting users in both daily activities and complex professional tasks. This vision directly supports Digital Transformation by engineering the next generation of human-AI collaboration. Furthermore, our work directly addresses one of the most critical societal challenges facing the world by developing the assistive technologies essential for ageing societies, thereby contributing to a sustainable future. Specifically, my research topics include: